Autonomy A(φ)
In our exploration we start with the central thesis of the ring, that autonomy can be accurately modelled as the product of personal and shared autonomy, which are represented by two interlinking spirals in a ring, as in figure 1.
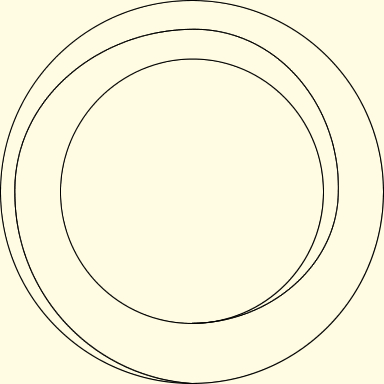
Figure 1
To show spirals as cyclical functions, we adapt the basic sin function with either the addition or subtraction of the angle φ divided by 2π, over the range 0 ≤ φ ≤ 2π. So, between 0 and 2π, one function increases by 1 while the other decreases by 1, as in figure 2.
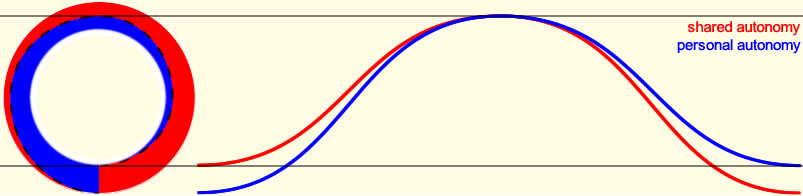
Figure 2
In order to map out the value of the product of the two wave functions at angle φ we multiply them together. Autonomy A(φ), using this relationship and adjusting to maintain the ratios expressed by the geometry of the ring, produces equation 1:

Equation 1
The graph of A(φ) is drawn with its components (personal and shared autonomy) in figure 3.
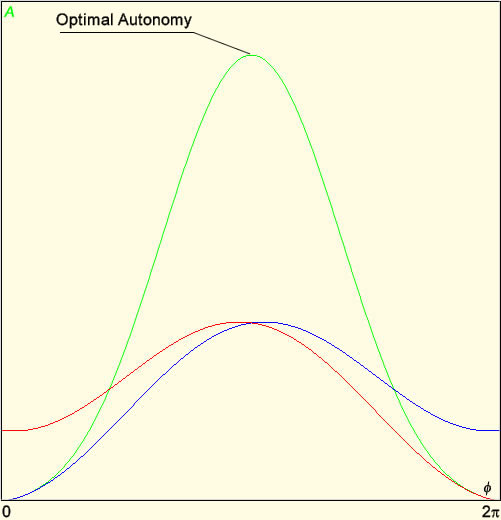
Figure 3
As can be seen, there is zero autonomy at the points 0 and 2π. In between, there is a smooth curve peaking at the optimum point where shared and personal autonomy are in balance, at φ=π.
Morality L(φ)
Morality is embedded within autonomy, and if we think of autonomy as the nature of the relationship between the individual and the group, morality is the impact of the group on the individual. As a conceptual tool to filter out morality for closer analysis we can treat morality as the inverse image of autonomy. Therefore morality L(φ), is described by the equation:

Equation 2
The graph of L(φ) is drawn with its components (personal and shared morality) in figure 4:
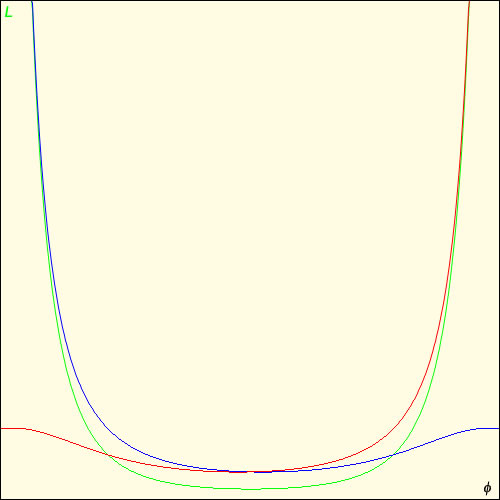
Figure 4
Initial observations using this definition of morality are:
- L(φ) is always greater than zero
- L(φ) is at it's lowest value at φ=π
- L(φ) = ∞ when φ=0 and φ=2π
To reflect the infinite nature of morality at φ=0 and φ=2π the ring's geometry is augmented to include a line.
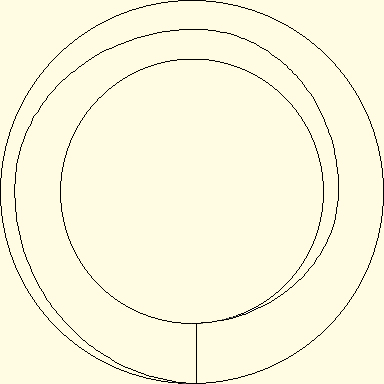
Figure 5
Autonomy and Morality AL(φ)
The AL (figure 6) is a shared space, Autonomy A(φ) and Morality L(φ) brought together. The self viewed from two different perspectives, either driven by autonomy or moderated by morality.
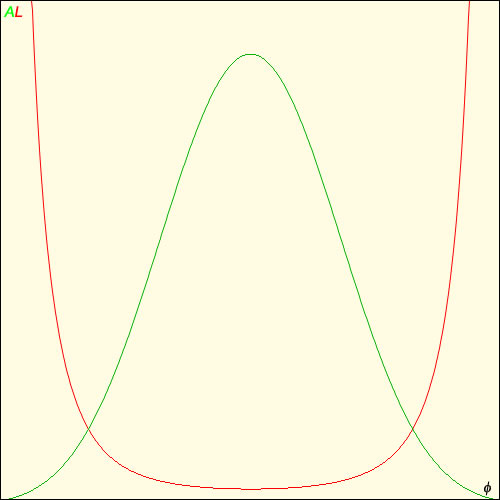
Figure 6
AL Analysis of the Learner Stances
The Leading Stance
When φ ≈ π, we are at our most autonomous and morality has least input. A region in our model, where others benefit the most from an individuals actions and as result, intervene the least.
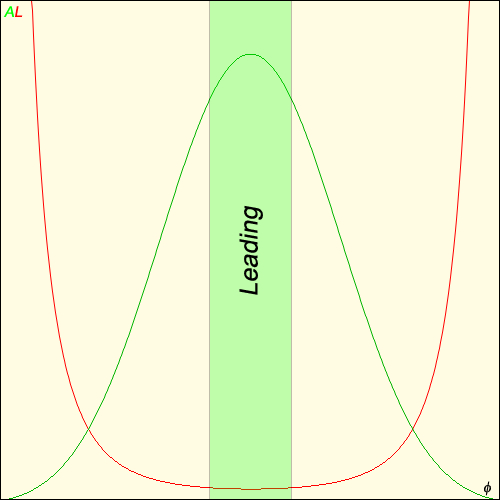
Figure 7
The Team-Playing and Performing Stance
L(φ) can be said to be relatively flat for half of the domain, and as such describes the entirety of the positive stances. The performing & team playing stances complete the remainder and are illustrated in figure 8.
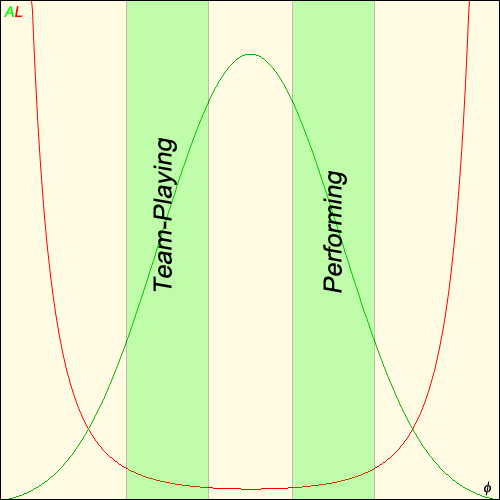
Figure 8
Figure 9 illustrates the positive domain in the ring, where others and the individual benefit from an individual's actions. This can be defined by the inequality:

Equation 3
Figure 9
The Own Worst Enemy Stance
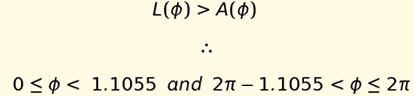
Own Worst Enemy holds two apparently disparate regions together into a single stance. This stance can be expressed as the solution of:
Equation 4
The above solution was obtained graphically using the AL, as figure 10 illustrates:
Figure 10
In this region, morality is at it's most powerful and autonomy at it's lowest ebb. For this to happen there are two different routes. The individual dominates the group, or the group dominates the individual. At the point φ=0 and φ=2π, behaviours could be viewed as either harm directed toward the self or harm directed toward others respectively.
Within the geometry of the ring, this region would be as Figure 11.
Figure 11
Sulking, Taking Over, Taking Things to Heart and Hiding Stance
In the model there is a specific threshold which can be expressed as the solution of:
Equation 5
The solution, again obtained graphically using the AL would be as figure 12:
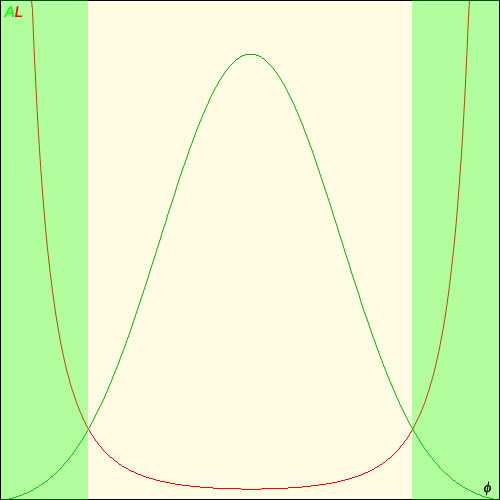
Figure 12
Within the geometry of the ring this region would be as Figure 13:
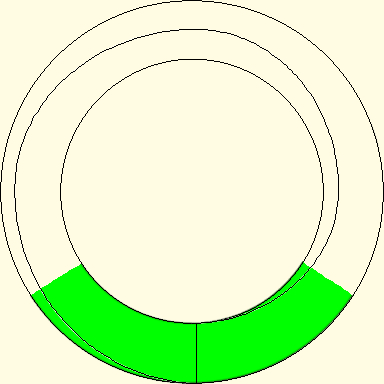
Figure 13
Removing the region already defined by L(φ)≫A(φ) from figure 13 leads to Figure 14:
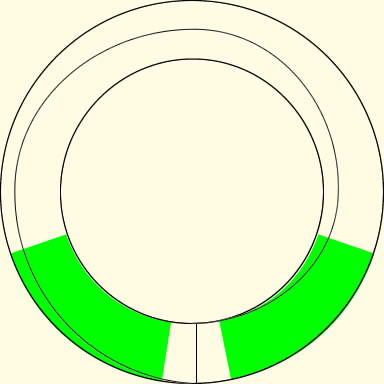
Figure 14
Looking at the AL for these regions, and mapping it's corresponding stance, we can allocate as in figure 15. The inner part (purple) characterised by an uneasy tension between morality and autonomy, and the outer part (green), where either personal or shared autonomy begin to give way and it's partner dominate's negatively.
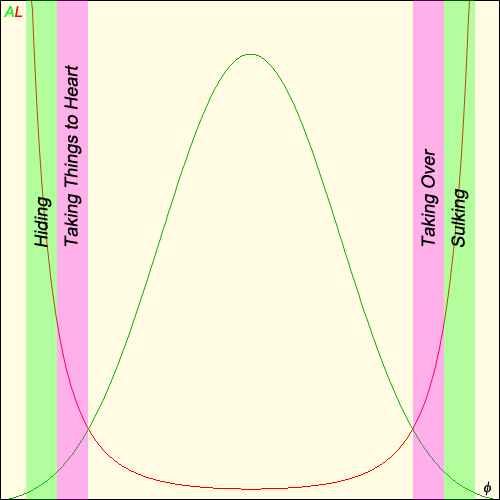
Figure 15
The Attention Seeking and People Pleasing Stance
Regions already defined in AL are shaded green in figure 16. The unshaded regions are characterised by an easier tension between morality and autonomy.
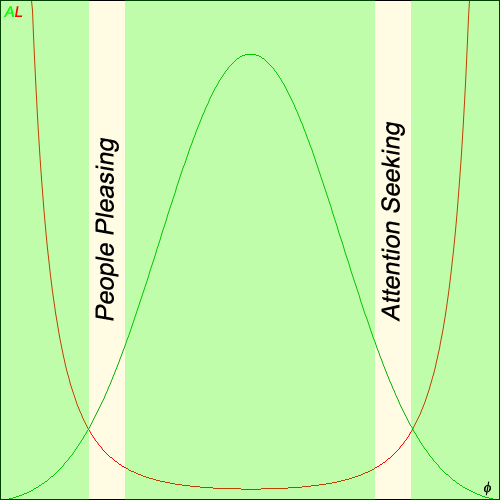
Figure 16
Bringing all the learning stances together into one AL we have figure 17.
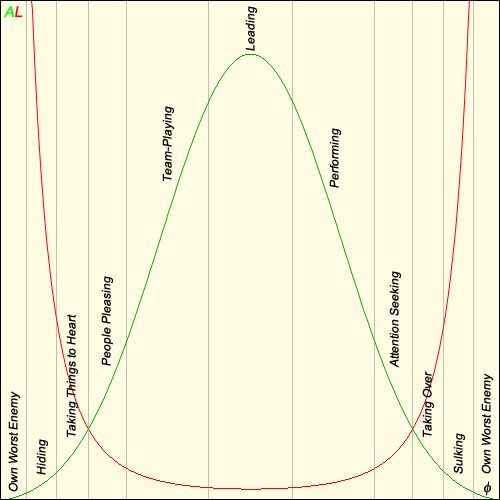
Figure 17